IMU18DMEMS惯性测量单元
IMU18DMEMS惯性测量单元即微机电系统惯性测量单元,在现代科技领域发挥着至关重要的作用。其应用广泛,涵盖了无人驾驶、无人机、机器人技术、VR/AR等多个前沿领域。通过集成加速度计、陀螺仪等传感器,MEMS IMU能够实时测量并输出物体的运动状态,为各种设备的精准控制提供了有力支持。
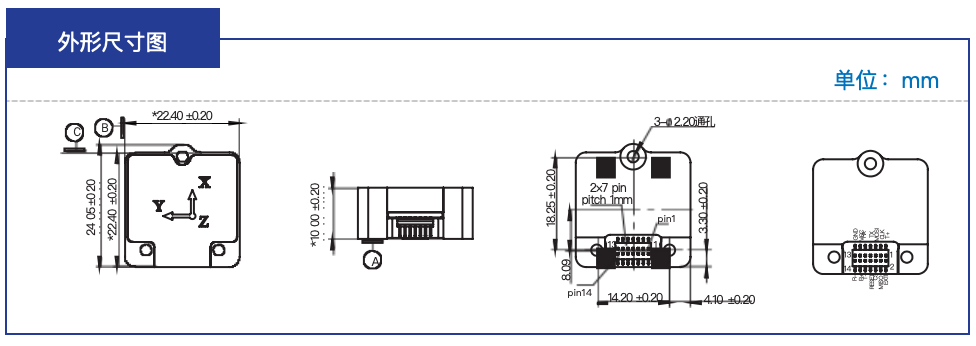
外观尺寸:
应用场景:
农业、工业设备、机器人、稳定平台、测绘、交通运输、无人机、无人驾驶。
技术指标:
| 单位 | 指标范围 |
|---|---|---|
电源电压 | V | 5±0.2 |
工作电流 | mA | 18±10 |
重量 | g | <15 |
准备时间 | s | ≤2 |
外形尺寸 | mm | 22.40×22.40×10.00 |
通信模式 | / | SPI/USART/RS422(可定制) |
陀螺仪性能指标
量程 | 。/s | ±400 |
|---|---|---|
标度因数非线性 | ppm | ≤100 |
标度因数重复性 | ppm | ≤100 |
交叉耦合误差 | % | ≤0.5 |
分辨率 | 。/s | ≤0.01 |
零偏(全温) | 。/s | ±0.05 |
零偏不稳定性(Allan方差) | 。/h | ≤3 |
零偏稳定性 | 。/h | ≤10 |
零偏重复性 | 。/h | ≤15 |
角度随机游走 | °/√h | ≤0.10 |
带宽 | Hz | ≥140 |
加速度计性能指标
量程 | g | ±40 |
|---|---|---|
零偏(全温) | mg | ≤10 |
零偏稳定性 | mg | ≤0.2 |
零偏重复性 | mg | ≤0.3 |
速度随机游走 | m/s/√h | ≤0.06 |
环境适应性
随机振动 | grms | ≥15(20Hz~2000Hz,3轴) |
|---|---|---|
冲击 | g | ≥1000(6ms,半正弦,3轴) |
工作温度范围 | ℃ | -45~+80 |
贮存温度范围 | ℃ | -50~+85 |
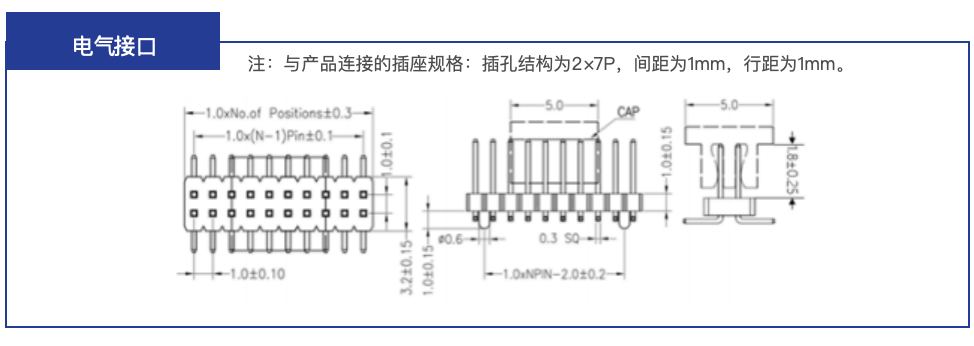
电气接口:
注:与产品连接的插座规格:插孔结构为2×7P,间距为1mm,行距为1mm。
引脚定义:
引脚序号 | 引脚名称 | 引脚描述 |
|---|---|---|
1 | RS422_T+ | RS422 输出正 |
2 | EXTI | 外部触发,厂家内部端口,建议接地或浮空处理 |
3 | SPI_CLK | SPI 串行时钟 |
4 | SPI_MISO | SPI 串行数据输出 |
5 | SPI_MOSI | SPI 串行数据输入 |
6 | SPI_CS | SPI 片选 |
7 | UART_TX | 接收异步数据输出 |
8 | RESET | 外部复位 |
9 | UART_RX | 接收异步数据输入 |
10 | RS422_T - | RS422 输出负 |
11 | VCC | 电源正 |
12 | RS422_R+ | RS422 输入正 |
13 | GND | 电源地 |
14 | RS422_R- | RS422 输入负 |
2025-10-22T14:55:29.501
价格:0.00
优惠价格:0.00
前一篇:MZD21单天线组合导航系统后一篇:IMU18MEMS惯性测量单元
