MZD22双天线组合导航系统
MZD22双天线组合导航系统基于高性能微机电系统MEMS惯性测量单元、微控制单元、卫星定位接收机组成。应用先进的数据融合算法,实时测量并输出高精度的载体位置、速度、姿态角等导航参数信息。 产品采用完全自主知识产权的惯性导航算法、MEMS器件温度误差补偿技术、系统级自标定和误差补偿技术,保证产品接口输出稳定、高精度的组合导航结果,不受动态条件影响。
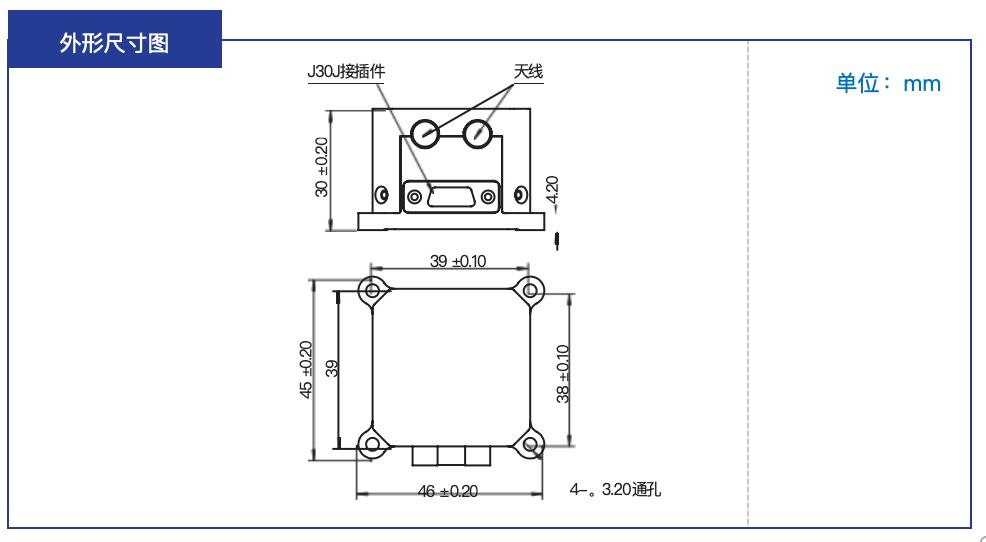
外观尺寸:
应用场景:
无人机导航:克服高楼林立的城市环境中的卫星信号遮挡问题,保障飞行稳定性。
智能驾驶:辅助自动驾驶车辆在复杂路况下的精准定位。
测绘与勘探:高精度姿态与位置信息满足地质勘测等专业需求。
技术指标:
| 单位 | 指标范围 | |
电源电压 | V | 12~36 | |
工作电流 | mA | <200 | |
重量 | g | <100 | |
准备时间 | s | GNSS板卡启动时间< 28 系统启动时间<1 | |
外形尺寸 | mm | 46.0×45.0×30.0 | |
水平速度精度 | m/s | 0.1 | |
天向速度精度 | m/s | 0.15 | |
姿态角精度 | 。 | 0.1 | |
方位角精度 | 。 | 0.2(1米基线) 0.1(2米基线) | |
姿态测量范围 | 。 | 俯仰角:-90~90 滚转角:-180~180 | |
方位测量范围 | 。 | 0~360(北偏东为正) | |
陀螺仪量程 | 。/s | ±400 | |
陀螺仪零偏稳定性 | 。/h | ≤10 | |
加速度计量程 | g | ±10 (量程可选±40g) | |
加速度计零偏稳定性 | mg | ≤1 | |
环境适应性
抗振动 | grms | ≥15 |
|---|---|---|
抗半正弦冲击 | g | ≥1000 |
工作温度范围 | ℃ | -45~+80 |
贮存温度范围 | ℃ | -50~+85 |
通讯协议:
默认采用RS422协议进行通讯,通信协议可定制。
串口数据格式: 1个起始位,8个数据位,1个停止位,无奇偶检验,多字节传送时先低字节后 高字节;波特率:921600bps;每10ms对外发送导航信息。
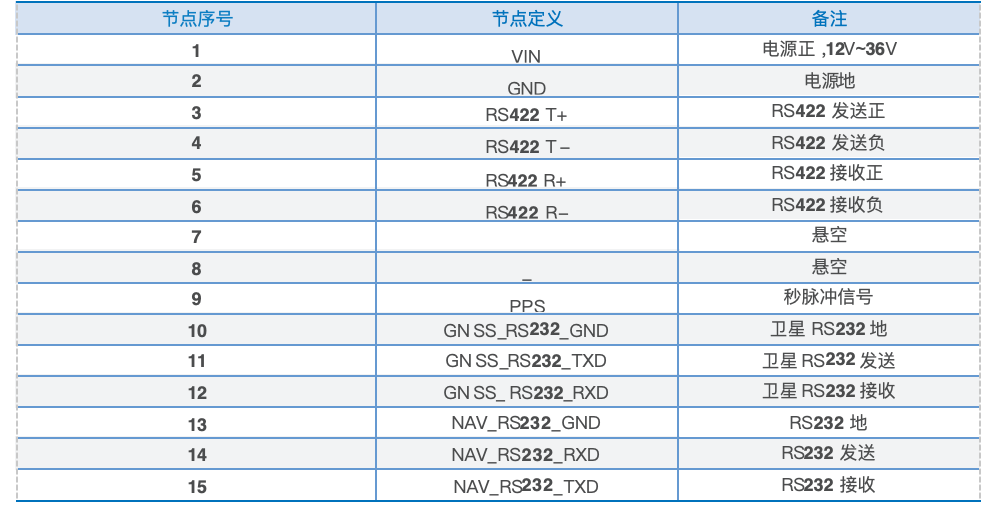
电气接口:
2025-10-22T14:55:29.501
价格:0.00
优惠价格:0.00
前一篇:TDG06、TDG06E三轴石英MEMS陀螺仪后一篇:国产压力传感器在核工业领域实现从 “跟跑” 到 “并跑” 的跨越
